
Technical6 Apr 20265 min read
How Flight Controllers Process Sensor Fusion in Real Time
Your drone is making thousands of decisions every second. Here's the invisible system making that possible.
Watch a drone hover perfectly still in a light breeze and you're witnessing something remarkable — not because it looks impressive, but because of what's happening inside that small box mounted at the center of the frame.
The flight controller is reading sensor data, detecting disturbances, calculating corrections, and sending updated commands to four motors — all of this happening hundreds of times per second, continuously, without pause.
The process that makes this possible is called sensor fusion. And understanding it changes how you think about everything from tuning a flight controller to diagnosing a crash.
The Problem Sensor Fusion Solves
No single sensor gives you a complete, reliable picture of where a drone is and how it's moving.
A gyroscope measures rotational rate — how fast the drone is pitching, rolling, or yawing. It's fast and precise in the short term. But gyroscopes drift. Leave one running for 30 seconds without correction and its output will have wandered from reality.
An accelerometer measures linear acceleration — forces acting on the drone along three axes. In theory you can integrate acceleration over time to get velocity, and integrate again to get position. In practice, sensor noise makes that calculation fall apart within seconds.
A barometer gives you altitude based on air pressure. Accurate over long periods, but slow to update and sensitive to airflow disturbances — which is a problem when your drone's own propellers are creating turbulence around the sensor.
A GPS receiver gives you absolute position on the Earth's surface. Accurate to metres in standard mode, centimetres with RTK. But GPS updates at 5–10 Hz — far too slow for the rapid corrections a flight controller needs to maintain stability.
Each sensor is useful. Each sensor is also limited. Sensor fusion is the process of combining all of them — intelligently, in real time — to produce an estimate of the drone's state that's better than any single sensor could provide alone.
The Math Behind It — Without the Math
The algorithm most flight controllers use for sensor fusion is called the Kalman Filter — or in many modern implementations, a variant called the Extended Kalman Filter (EKF).
You don't need to understand the full mathematics to grasp the core idea.
The Kalman Filter works by maintaining two things simultaneously: a prediction of where the drone is based on its last known state and the physics of motion, and a measurement from the sensors about where it actually is.
Neither the prediction nor the measurement is perfectly trusted. The filter knows that predictions drift over time, and that sensor measurements contain noise. So it combines them — weighted by how reliable each source is at any given moment — to produce a best estimate of the drone's actual state.
When the GPS signal is strong and stable, the filter weights GPS heavily. When GPS is degraded — flying near buildings, under tree cover — the filter shifts trust toward the IMU and barometer. When the drone is maneuvering aggressively and accelerometer noise spikes, the filter compensates.
This continuous, adaptive weighting is what makes the system robust. The drone doesn't crash when one sensor gives a bad reading because the filter never trusted any single sensor completely.
What the Flight Controller Does With This Information
Once the EKF has produced a state estimate — position, velocity, orientation, acceleration — the flight controller feeds that into its control loops.
Most modern flight controllers run a cascaded PID control structure. The outer loop controls position. The middle loop controls velocity. The inner loop — running fastest of all, typically at 400–1000 Hz — controls attitude: the pitch, roll, and yaw angles of the drone.
Each loop takes the difference between where the drone should be and where it actually is — the error — and calculates a corrective output. That output feeds into the next loop inward, until the innermost loop translates everything into specific throttle commands for each motor.
The result is a continuous feedback system that keeps the drone where you told it to be, despite wind, payload shifts, battery voltage changes, and every other disturbance the real world throws at it.
Why This Matters for Pilots and Builders
Understanding sensor fusion isn't just academic. It has direct practical implications.
Vibration kills sensor data. Accelerometers are extremely sensitive to mechanical vibration from unbalanced propellers or loose motor mounts. Excessive vibration injects noise into the sensor stream that the EKF can't fully filter out — resulting in toilet-bowl oscillations, altitude hold drift, and in bad cases, a fly-away. Balancing props and isolating the flight controller with dampening foam isn't optional housekeeping. It's protecting your sensor data quality.
Compass interference corrupts heading. The magnetometer — compass — is one of the inputs to the EKF's heading estimate. Place it near a power distribution board carrying high current, and the magnetic field from that current will corrupt your compass readings. This is why compass calibration matters, and why compass and GPS modules are mounted on elevated masts away from the main electronics.
EKF errors show up in logs before they show up as crashes. Modern flight controllers running ArduPilot or PX4 log EKF variance data — a measure of how uncertain the filter is about its state estimate. Reviewing this data after flights, especially before relying on a platform for critical missions, can reveal sensor problems before they become flight problems.
The Hardware Doing This Work
On a typical modern flight controller — a Pixhawk, a Cube Orange, a Holybro Kakute — the sensor fusion and control loops run on a dedicated STM32 microprocessor operating at hundreds of megahertz.
The IMU sensors themselves — typically a combination of two or three redundant accelerometer and gyroscope units from manufacturers like Invensense or Bosch — are sampled at 1 kHz or higher. The EKF runs at a lower rate, typically 400 Hz, balancing computational load against update frequency.
Redundant sensors aren't just a reliability feature — they give the EKF additional inputs to cross-check, improving estimate quality and allowing the system to detect and exclude a failed sensor automatically.
The Bottom Line
A drone hovering steadily in wind isn't magic. It's mathematics running very fast on very good sensor data.
Sensor fusion is the invisible foundation of everything a modern flight controller does. Understanding it helps you build better, tune better, diagnose faster, and trust your platform more intelligently — because you know exactly what it's relying on to stay in the air.
Flight ControllerSensor FusionIMUAccelerometerGyroscopeArduPilot
Enjoyed this read?
Get articles like this delivered weekly — technical deep dives, industry news, and drone insights from India.
More in Technical
Technical5 MIN READ
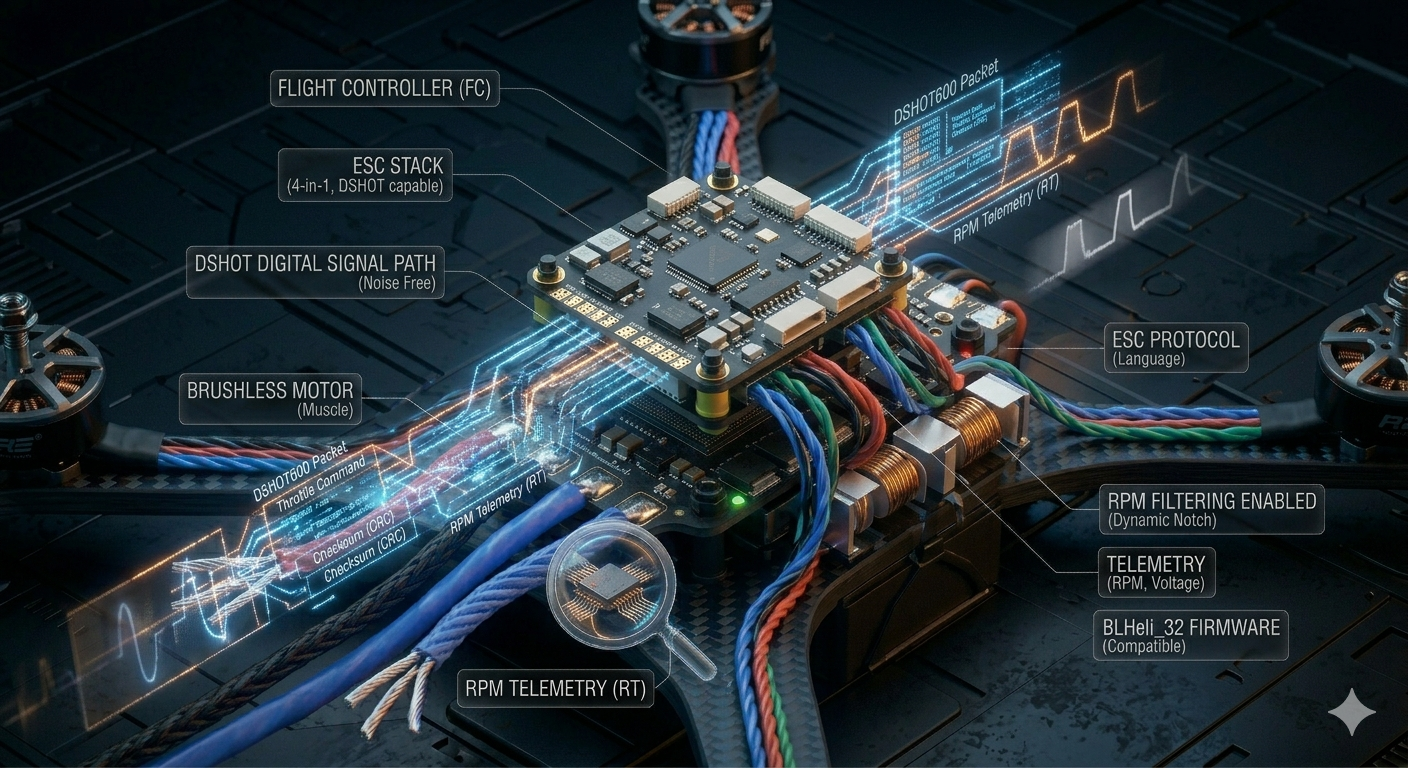
ESC Protocols Explained: PWM, DSHOT, and What to Choose
The signal between your flight controller and motors is smaller than you think — and more important than most builders realize.
By The Drone Post

Technical5 MIN READ
Understanding GPS vs RTK: Which Positioning System Does Your Drone Need?
Your drone knows where it is. But how accurately — and does it matter for your mission?
By The Drone Post